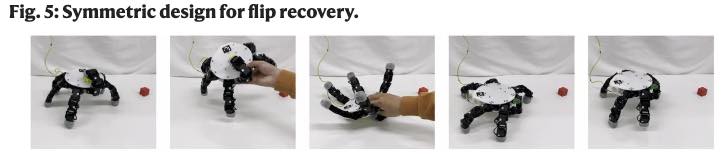
Une main robotique qui se décroche de son bras, se faufile dans un espace étroit, récupère des objets hors de portée, puis revient se rebrancher comme si de rien n’était : le scénario semble tout droit sorti de la science-fiction. Pourtant, c’est bien l’idée démontrée par une équipe de chercheurs associant l’École polytechnique fédérale de Lausanne (EPFL) et le Massachusetts Institute of Technology (MIT). Leur prototype, décrit dans Nature Communications mise sur un pari de conception inhabituel : la symétrie.
Au lieu d’imiter fidèlement la main humaine et son pouce opposable, la nouvelle approche s’appuie sur des doigts identiques capables de fonctionner comme des paires opposables dans plusieurs configurations. Résultat : une main plus polyvalente pour la manipulation, mais aussi assez robuste et stable pour se déplacer en utilisant ses doigts comme des appuis.
Pourquoi la symétrie change la donne en robotique
Les mains robotiques se sont multipliées ces dernières années, avec des objectifs très variés : précision, vitesse, sensibilité tactile, adaptation à des objets fragiles… Beaucoup de modèles s’inspirent de l’anatomie humaine, avec une structure asymétrique centrée sur un pouce préhensile. Ce choix est logique pour reproduire des gestes du quotidien, mais il impose aussi des contraintes.
Dans leur publication, les chercheurs rappellent que l’asymétrie à la manière humaine limite certaines actions où des points de contact symétriques sont essentiels : utiliser un tournevis avec un seul bras, visser un bouchon sans repositionner en permanence le poignet, ou maintenir un objet tout en manipulant un second élément. Autrement dit, une main très “humaine” peut se révéler moins pratique dès qu’on l’emmène dans des scénarios industriels où l’orientation du poignet, l’encombrement et l’accès à la zone de travail dictent la manœuvre.
Des doigts réversibles et une paume pensée comme une plateforme
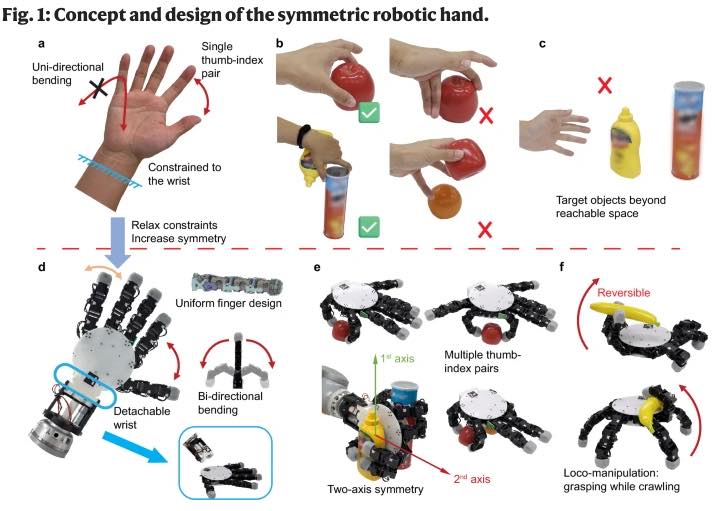
Le cœur du concept tient à la réversibilité : chaque doigt peut se plier dans deux directions, ce qui permet à la main de saisir “des deux côtés”, sans exiger de grandes rotations du poignet. Les auteurs résument l’idée en indiquant qu’ils présentent « une conception de doigt réversible permettant de saisir des deux côtés » et une architecture optimisée pour répartir les rôles entre les doigts.
Cette logique transforme la paume en une plateforme plus neutre, où n’importe quelle paire de doigts peut jouer le rôle d’opposition, un peu comme si la main disposait de plusieurs “thumbs” potentiels. En pratique, cela ouvre des prises qui restent difficiles pour des mains anthropomorphiques classiques, notamment lorsqu’il faut maintenir l’objet dans un axe précis.

Une main qui se détache, puis se déplace avec ses doigts
L’autre surprise, plus spectaculaire, est la modularité : la main n’est pas condamnée à rester au bout d’un bras robotisé. Dans les démonstrations, elle est montée sur un bras industriel (type KUKA LBR iiwa), puis se détache via un mécanisme d’attache/détache. Une fois libérée, elle devient une petite machine autonome capable de “ramper” sur une surface en alternant appuis et mouvements, à la manière d’un mini-robot à pattes… sauf qu’ici, les pattes sont des doigts.
Cette capacité répond à un problème très concret : même un bras robotique performant a une zone de travail limitée. Si un objet se trouve derrière un obstacle, sous un meuble, dans un recoin, ou au-delà de la portée, il faut déplacer tout le robot, ou ajouter un autre système mobile. Avec une main détachable, le robot peut rester en position, envoyer son effecteur final dans un passage étroit, récupérer ce qui est inaccessible, puis réassembler l’ensemble.
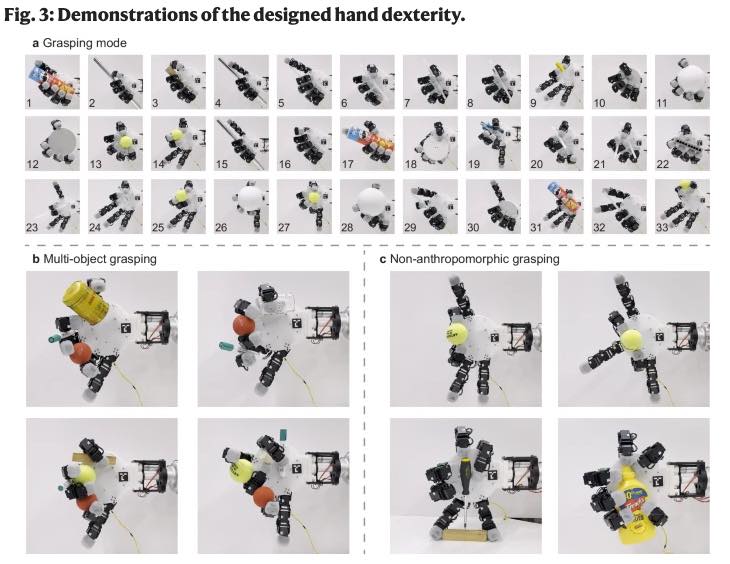
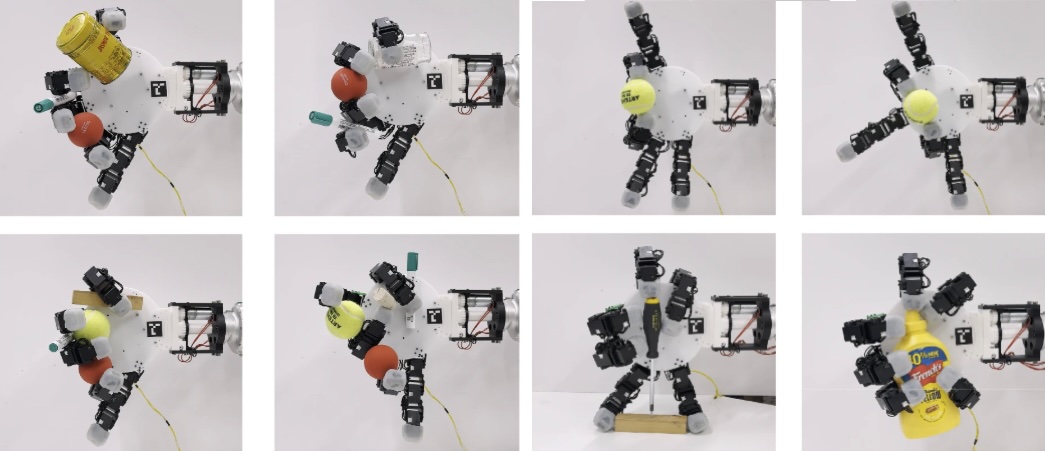
Saisir plusieurs objets à la fois : une démonstration de dextérité
L’un des points marquants des essais est la capacité à gérer plusieurs objets simultanément. La main étudiée peut, selon la configuration choisie, maintenir différents éléments tout en conservant suffisamment de doigts “libres” pour assurer la locomotion. Dans certaines séquences, l’équipe montre une récupération multi-objets : plusieurs pièces sont maintenues contre la paume par une partie des doigts, tandis que les autres servent d’appuis pour revenir vers le bras.
Au-delà du côté impressionnant, cette aptitude cible des tâches très banales en maintenance ou en logistique : récupérer plusieurs petites pièces, trier des éléments dans une zone exiguë, ou ramener des objets tombés dans une machine sans démonter un carter entier.

Comment le prototype a été conçu et optimisé
Concevoir une main qui manipule et se déplace, ce n’est pas seulement une affaire de mécanique : c’est aussi une question d’algorithmes. L’équipe a construit une approche combinant planification de prises, simulation physique et optimisation, afin de trouver des configurations réellement exploitables.
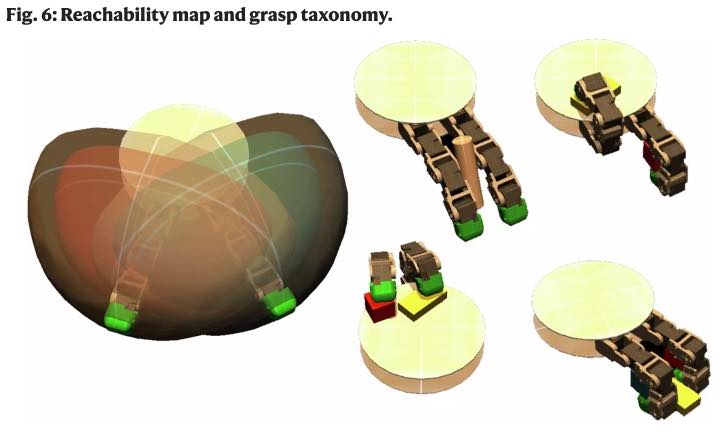
Bibliothèque de prises, simulations et optimisation
Les chercheurs s’appuient sur une taxonomie de prises : un ensemble de configurations de contact doigt-objet servant de base à la synthèse de gestes. L’idée est de décrire des prises élémentaires (des primitives) pouvant être combinées, puis de tester différentes dispositions de doigts sur la paume.
Pour la locomotion, le système ne se contente pas d’une marche programmée à la main. Les essais reposent sur de la simulation dans un moteur physique (MuJoCo) afin d’évaluer stabilité, distance parcourue, glissements et contraintes. Une optimisation de type évolutionnaire (proche des algorithmes génétiques) permet ensuite de sélectionner des paramètres de déplacement efficaces, puis de transférer les résultats vers le prototype réel.
Autre point important : la conception n’est pas figée à un seul nombre de doigts. Le cadre de recherche explore plusieurs configurations, avec un nombre de doigts variable, afin d’identifier le meilleur compromis entre capacité de saisie et capacité de déplacement. Dit autrement, ajouter des doigts peut aider… jusqu’au moment où la complexité mécanique et le contrôle deviennent un frein.
Applications possibles : industrie, inspection, intervention
À court terme, cette main robotique reste un prototype de laboratoire. Mais son positionnement est clair : elle vise des environnements où l’accès est contraint, où l’opérateur humain est exposé à un risque, ou où la productivité dépend d’une récupération rapide d’objets difficiles à atteindre.
Dans l’industrie, on peut imaginer des scénarios d’inspection dans des conduites, des interstices de machines, ou des zones encombrées où un bras ne peut pas entrer. La main pourrait aussi servir d’outil de récupération dans des ateliers automatisés : aller chercher une pièce éjectée hors convoyeur, ramener un élément coincé, ou manipuler un petit outillage sans changer d’effecteur.
Dans le domaine des interventions, le principe d’un effecteur capable de se faufiler et de rapporter des objets ouvre des pistes en secours et en exploration : accéder à un compartiment instable, récupérer un élément critique dans un espace réduit, ou intervenir dans des environnements potentiellement dangereux (fumées, chaleur, produits chimiques), sans envoyer un humain au contact.
Les défis à résoudre avant un usage réel
La démonstration est prometteuse, mais l’industrialisation d’un tel concept soulève plusieurs questions : robustesse en conditions réelles, vitesse de déplacement, gestion de l’énergie, tolérance à la poussière et aux débris, sécurité au contact, et fiabilité du mécanisme d’attache/détache. La coordination entre locomotion et manipulation devra aussi gagner en autonomie : plus le robot devra décider seul quels doigts marchent”et lesquels tiennent, plus il faudra des stratégies de contrôle capables de s’adapter à l’imprévu.
Reste que l’approche marque un tournant intéressant : plutôt que d’essayer de copier la main humaine à tout prix, l’équipe assume une architecture pensée pour la robotique, et non pour l’anatomie. En combinant symétrie, doigts réversibles et modularité, ce prototype illustre une tendance de fond : les robots gagnent en polyvalence non pas seulement grâce à l’IA, mais aussi grâce à des choix mécaniques qui élargissent, concrètement, ce qu’ils peuvent faire sur le terrain.

























")

")